Configuración AS32&E32-ttl-100

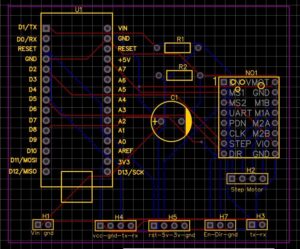
Propuesta de configuración del módulo transceptor con arduíno nano, donde se pueden cambiar los modos de trabajo a traves de dos pines digitales conectados a M1 y M0 .La salida «aux» la podremos utilizar bien con un diodo led conectado a un nivel HIGH, o a un pin digital para indiCarnos la actividad de TX/RX …